自然界中的生物由于其良好的适应能力而能够在复杂的自然环境中生存和繁衍,如能够感知危险信号,并据此来调整自身的形态和运动以逃避危险。而赋予生物这种能力最重要的组成部分之一是具有感知和机械变形特征的软组织,它能够可逆地改变其外貌和行为。受到这些软组织和功能的启发,人们致力于开发各种软材料来构建比色传感器/驱动器、电子皮肤和气动/液压驱动伪装系统等。弹性体由于其固有的柔韧性、弹性和可拉伸性,能够很好地模拟生物系统和功能,且对环境友好,是一种极具前途的仿生软材料。虽然目前已经大量研究了具有类皮肤可拉伸变形行为的弹性体驱动系统,但是还缺乏在同一个系统中感知和变形/运动能力的协同作用,这导致驱动器不能像生物体一样根据外界的刺激响应来调节自身的行为。
基于中国科学院宁波材料技术与工程研究所陈涛研究员课题组在柔性传感器和软驱动器方面的研究基础(Adv. Mater., 2020, 2004290; Nat. Commun., 2020, 11, 4359; Angew. Chem. Int.Ed., 2019, 58,16243; J. Mater. Chem. A, 2019, 7, 26631; ACS Nano, 2019, 13, 4368; Nano Energy, 2019, 59, 422; Adv. Funct. Mater., 2018, 28, 1704568; Chem. Mater., 2018, 30, 4343; J. Mater. Chem. C, 2018, 6, 5140; J. Mater. Chem. C, 2018, 6, 6666等)。近期,受到小丑鱼鱼鳔同时具有感知和变形驱动功能的启发,开发了一种水下自感知的软驱动器。
该工作通过在水/空界面制备超薄的聚二甲基硅氧烷(PDMS)和PDMS/碳纳米管(CNTs) Janus膜,由于其良好的自适性和粘性,通过将上述薄膜无缝转移集成为一个三明治复合膜,以模仿鱼鳔膜。以可拉伸的弹性PDMS基体模仿鱼鳔的充气/放气变形行为,而用导电CNTs网络薄膜模仿鱼鳔具有类似皮肤神经网络的感知功能。由于复合薄膜良好的弹性、自适性和保形性,它可以进一步转移至一个中空的模型上形成自封闭的人工鱼鳔。外界气压的变化时,会引起复合膜发生膨胀或者凹陷变形。根据压阻传感机理,复合薄膜的这种形变会引起碳纳米管导电网络间接触电阻的变化,从而实现对变形行为的实时监测。当将整个系统置于水中时,可以用膜的膨胀和凹陷行为模仿鱼鳔的充气/放气行为,通过调节外界气压可以实现对整个系统在水中的上下运动行为的精确控制,同时其运动过程也可以通过电信号实时监测。此外,还能实现对外界信号的监测感知并根据感知信号执行气动驱动行为。因此,该研究成功地将传感和驱动功能集成到一个三明治复合膜中,实现了协同仿生行为,在智能集成软机器人方面展示出巨大的潜力。
该工作以题为“Biomimetic Underwater Self-Perceptive Actuating Soft System Based on Highly Compliant, Morphable and Conductive Sandwiched Thin Films”的论文发表在Nano Energy, 2020, DOI.org/10.1016/j.nanoen.2020.105617。本研究得到了国家自然科学基金(52073295,51803226)、中国科学院前沿科学重点研究项目(QYZDB-SSWSLH036)、中国科学院国际合作局(174433KYSB20170061)、博士后创新人才支持计划(BX20180321)、中国博士后科学基金(2018M630695)和宁波市科技创新2025重大专项(2018B10057)等项目的资助。
自然界中的生物由于其良好的适应能力而能够在复杂的自然环境中生存和繁衍,如能够感知危险信号,并据此来调整自身的形态和运动以逃避危险。而赋予生物这种能力最重要的组成部分之一是具有感知和机械变形特征的软组织,它能够可逆地改变其外貌和行为。受到这些软组织和功能的启发,人们致力于开发各种软材料来构建比色传感器/驱动器、电子皮肤和气动/液压驱动伪装系统等。弹性体由于其固有的柔韧性、弹性和可拉伸性,能够很好地模拟生物系统和功能,且对环境友好,是一种极具前途的仿生软材料。虽然目前已经大量研究了具有类皮肤可拉伸变形行为的弹性体驱动系统,但是还缺乏在同一个系统中感知和变形/运动能力的协同作用,这导致驱动器不能像生物体一样根据外界的刺激响应来调节自身的行为。
基于中国科学院宁波材料技术与工程研究所陈涛研究员课题组在柔性传感器和软驱动器方面的研究基础(Adv. Mater., 2020, 2004290; Nat. Commun., 2020, 11, 4359; Angew. Chem. Int.Ed., 2019, 58,16243; J. Mater. Chem. A, 2019, 7, 26631; ACS Nano, 2019, 13, 4368; Nano Energy, 2019, 59, 422; Adv. Funct. Mater., 2018, 28, 1704568; Chem. Mater., 2018, 30, 4343; J. Mater. Chem. C, 2018, 6, 5140; J. Mater. Chem. C, 2018, 6, 6666等)。近期,受到小丑鱼鱼鳔同时具有感知和变形驱动功能的启发,开发了一种水下自感知的软驱动器。
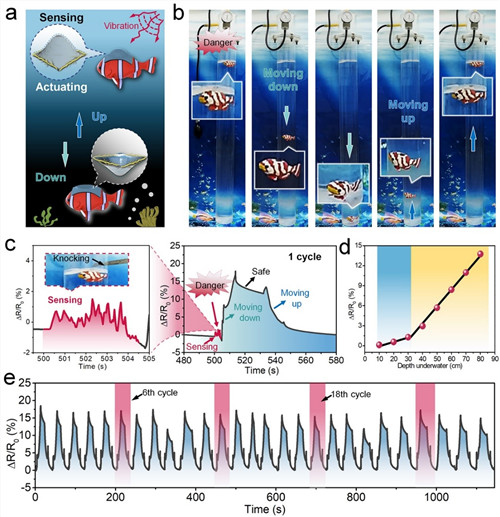
该工作通过在水/空界面制备超薄的聚二甲基硅氧烷(PDMS)和PDMS/碳纳米管(CNTs) Janus膜,由于其良好的自适性和粘性,通过将上述薄膜无缝转移集成为一个三明治复合膜,以模仿鱼鳔膜。以可拉伸的弹性PDMS基体模仿鱼鳔的充气/放气变形行为,而用导电CNTs网络薄膜模仿鱼鳔具有类似皮肤神经网络的感知功能。由于复合薄膜良好的弹性、自适性和保形性,它可以进一步转移至一个中空的模型上形成自封闭的人工鱼鳔。外界气压的变化时,会引起复合膜发生膨胀或者凹陷变形。根据压阻传感机理,复合薄膜的这种形变会引起碳纳米管导电网络间接触电阻的变化,从而实现对变形行为的实时监测。当将整个系统置于水中时,可以用膜的膨胀和凹陷行为模仿鱼鳔的充气/放气行为,通过调节外界气压可以实现对整个系统在水中的上下运动行为的精确控制,同时其运动过程也可以通过电信号实时监测。此外,还能实现对外界信号的监测感知并根据感知信号执行气动驱动行为。因此,该研究成功地将传感和驱动功能集成到一个三明治复合膜中,实现了协同仿生行为,在智能集成软机器人方面展示出巨大的潜力。
该工作以题为“Biomimetic Underwater Self-Perceptive Actuating Soft System Based on Highly Compliant, Morphable and Conductive Sandwiched Thin Films”的论文发表在Nano Energy, 2020, DOI.org/10.1016/j.nanoen.2020.105617。本研究得到了国家自然科学基金(52073295,51803226)、中国科学院前沿科学重点研究项目(QYZDB-SSWSLH036)、中国科学院国际合作局(174433KYSB20170061)、博士后创新人才支持计划(BX20180321)、中国博士后科学基金(2018M630695)和宁波市科技创新2025重大专项(2018B10057)等项目的资助。
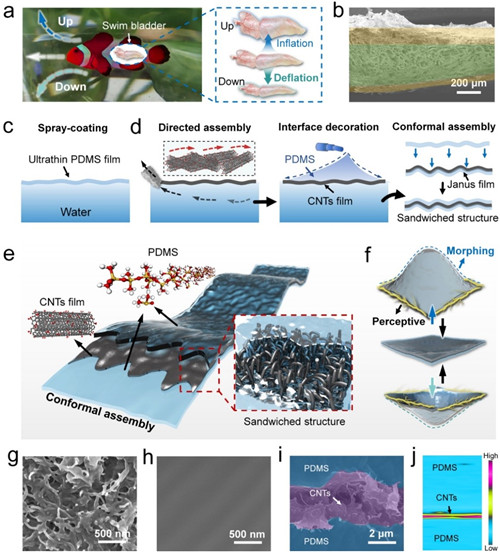
图1(a)小丑鱼由鱼鳔充气/放气行为引起的上浮/下潜运动示意图;(b)真实鱼鳔经冷冻干燥后的SEM图像;(c-d)在空气/水界面制备超薄PDMS和CNTs/PDMS Janus膜的示意图,以及将二者集成为一个三明治自感知弹性复合膜(PCP)的制作过程示意图;(e)PCP膜的结构示意图;(f)驱动变形和传感的协同作用示意图;(g-h)CNT /PDMS Janus膜在分别水侧和空气侧的扫描电镜图;(i-j)PCP膜的截面扫描电镜图(i)和二维拉曼图(j)
(高分子与复合材料实验室 梁云)